
Our project is in full progress right now, in the last weeks we had the kick-offs and initial presentations.
Since we had a project management course first we had to do one presentation focusing mainly on the management part (done by Willem and Maxim) and then finally our so called "Initial presentation" (done by Willem and me) were we had to present more about our actual work.

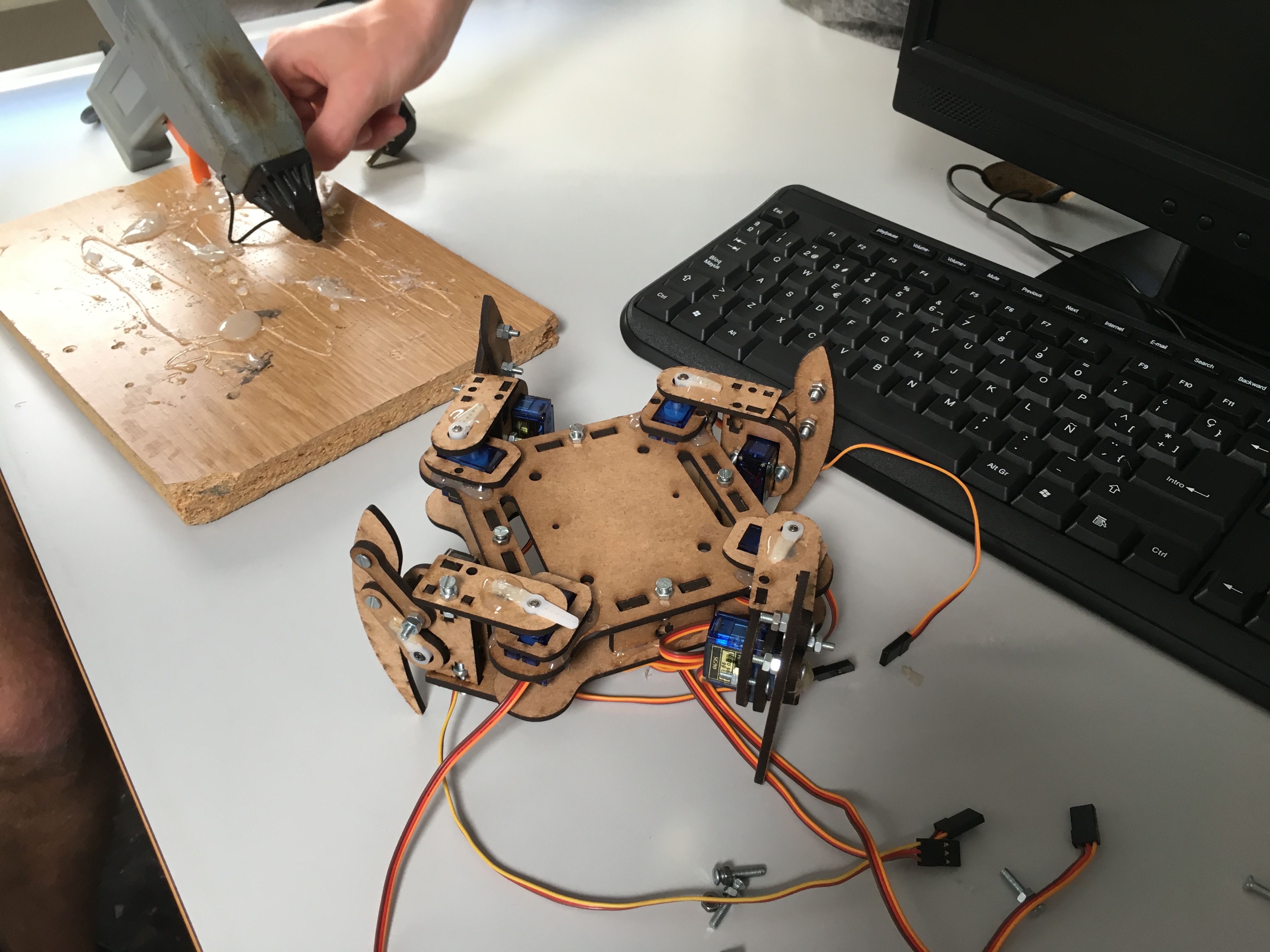
The first presenters were selected at random. After that one week went by in which we already assembled our first prototype, basically the MePedv2 design manufactured from old parts from the DYOR Project.
What is all that stuff you might ask? Well: The DYOR project was last years groups work: a simple to build, customizable Robot for kids.
MePedv2 is a Kit for a robot crap with four legs, but we don't like the design too much. But for inspiration and trying out different programming patterns it is very useful, so we quickly manufactured it on the laser cutter and used old DYOR servo motors.

At the university we have a laser cutter and also a room with some tools but I figured out that it is very useful to have my own equipment at hand all the time :-)
Just recently we got the message that we can also finish with two different robot designs, so we are probably going to do a second "hip less" design of a walking robot. An example for this design would be the "Zowie" from BQ, I found it at the local Media Markt.

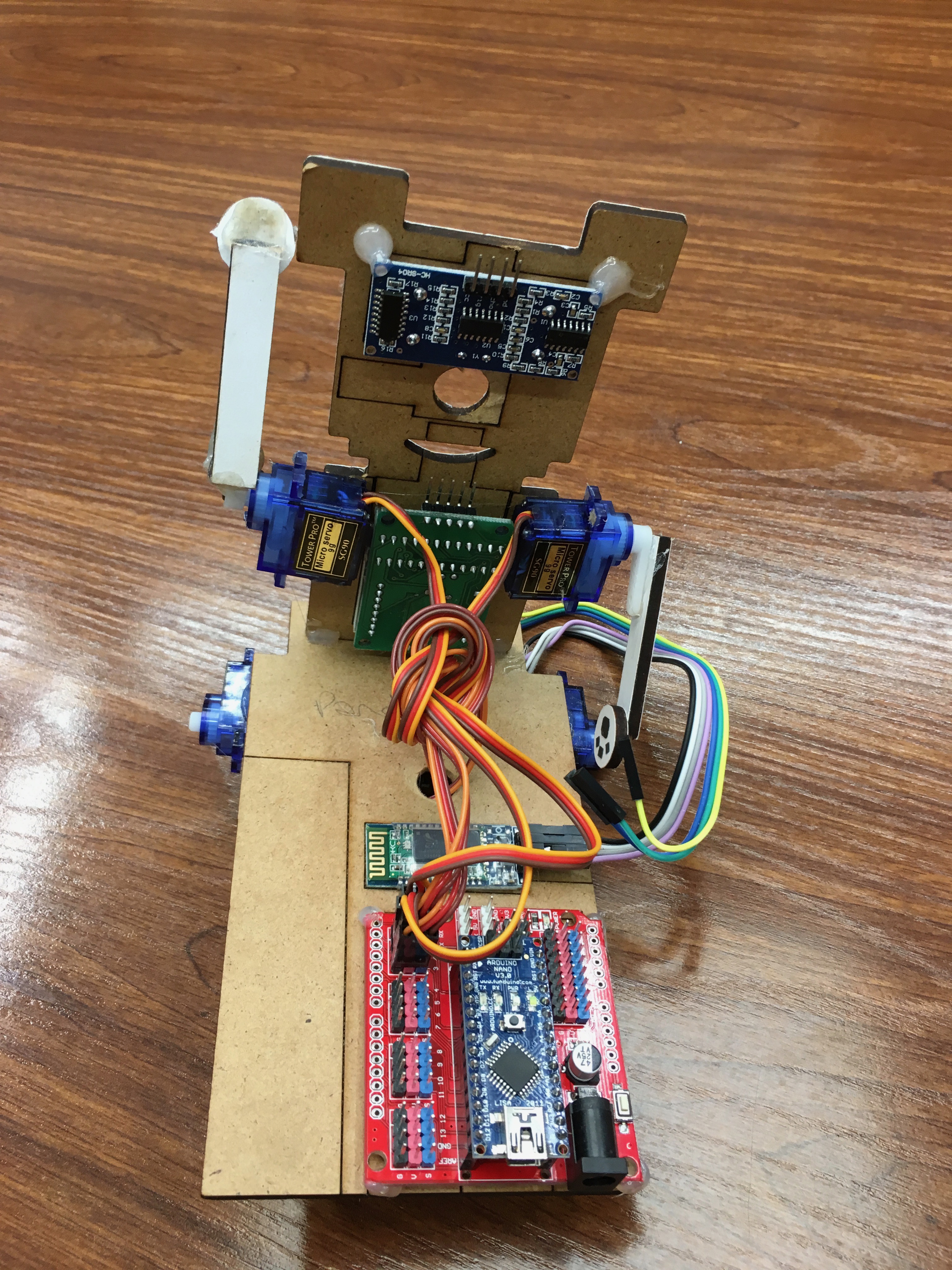
After we return from the road trip we will get back and work on the robot again but for now we made some pretty good progress and we already decided on what electronics to use and how. Plans are pretty far, the next big thing is going to be software and programming.

