
A lot has happened since we had our initial presentation. Suddenly it is the midterm presentation and we had to actually deliver!
The midterm presentation date was right on the day after I came back from Vienna. I was more or less sure that everybody knows what to do. Additionally we had to hand in a report. Half of it was already done but a big part was also still missing. Luckily we had several more days after the Midterm Presentation to finish and finalize our report.
Now to the fun stuff: what we actually presented.
For this presentation Lars Willem and Anja did it. This means that the final presentation at the end will be held by Maxim, Joran and me.
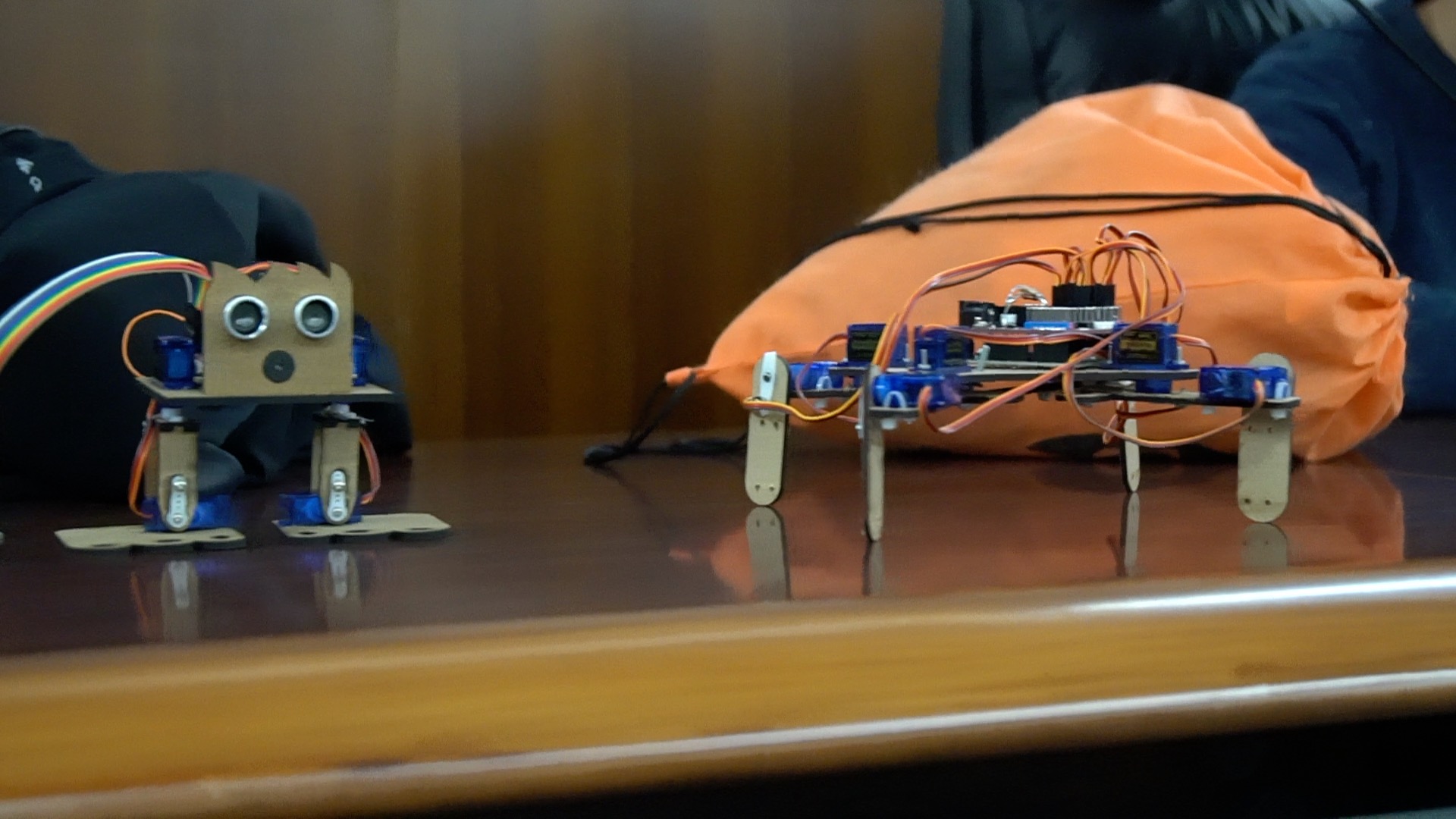
One of the main news since the initial start of the project was that we changed our goal from creating one robot to two. We were asked if it would be possible to build not just the crab robot but also the hippless one and we accepted the challenge. So by the time of the midterm presentation we already had a basic prototype of the second robot to show. It did not really move though. But the crab robot did. We showed several renderings of the designs and a video of the moving crab. (Still: there is so much to improve from here.)
Here are a few of these animations:
And also some photos of the presentation itself:


In my humble opinion the three did very well (with the exception of some very small incorrect details). Our presentation was the first in the morning and you could clearly see that we would all have needed more coffee ☕️ (or sleep, depends how you see it 😅). Also there should have been a livestream. But in the beginning it was broken. And since we where the first group we got nothing. No livestream, no complete recording.... (this is still a technical university I should ad... 🧐) The room itself was pretty cool though. Built for press-conferences but also quite OK for presentations. We had enough space behind the table and 2 preview monitors in front of us.

The presentation got pretty good feedback from the board. We were able to handle the questions asked afterwards pretty well. Most of them were very specific details of how we plan to go ahead. Also the grading was pretty good afterwards.
What happened in the meanwhile?
- Since the midterm presentation we have been working on a lot. We extended the face to have a funny LED circle as a mouth and I've written a library to support different faces and play sounds.
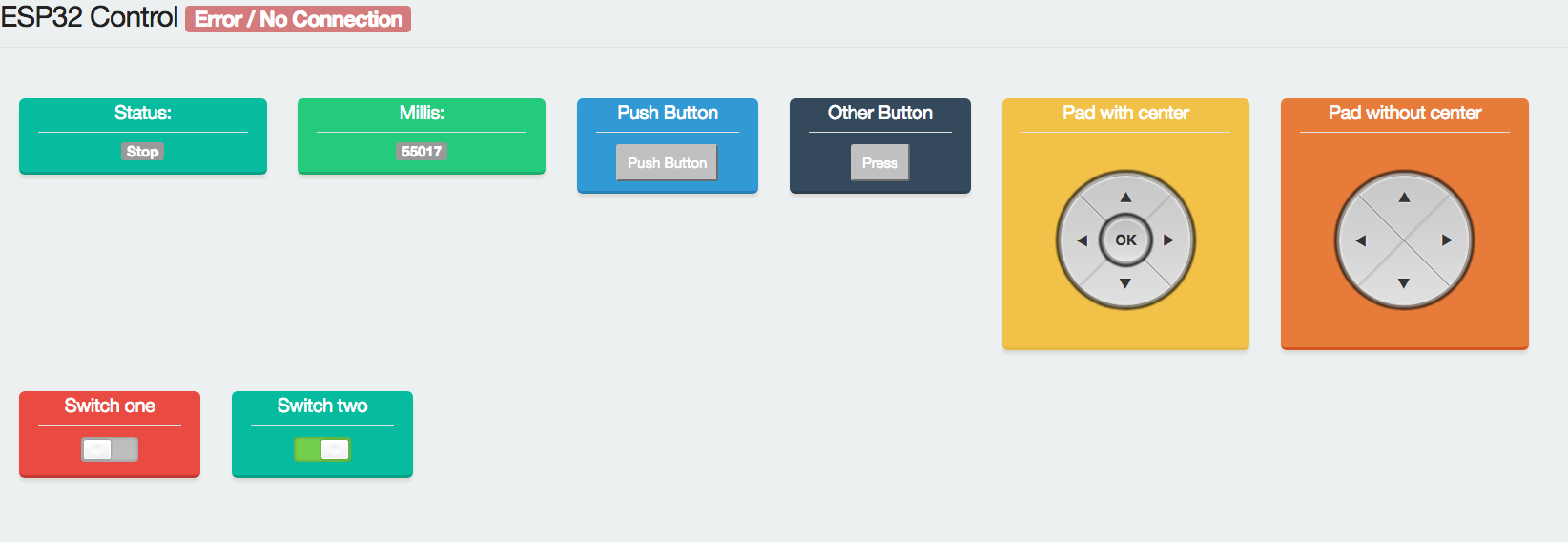
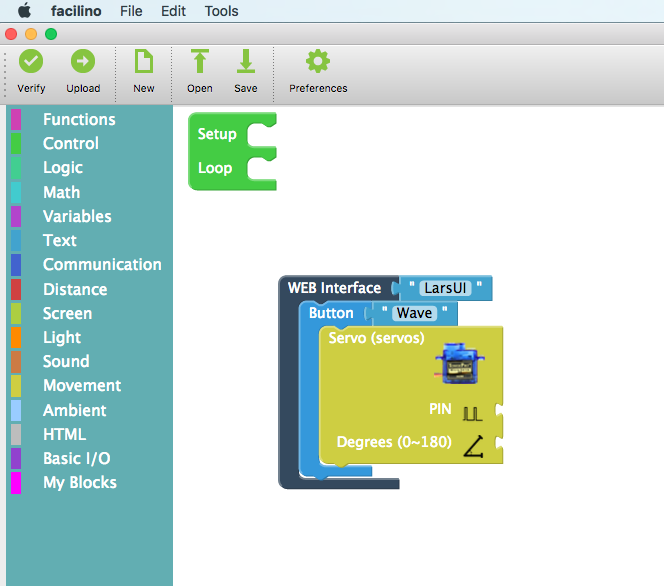
- Also I improved the web interface library for the ESP32 a lot. You can now even use it with the ESP8266, it got a nice design, customizable colors and a fancy new slider component.
- By now also the movement library for the HIPPIE is about to be finalized and the crabs movements are highly improved.
- A lot of adjustments were made on the design
- We started to make documentation and assembly guides
The three biggest issues we had to fight with to date were:
- web server issues on the ESP32
- a complex power issue
- some really silly cheap china hardware problems
But I will probably elaborate about these in my final post about the robot.
There are still a lot of things to do but we will start them with refueled energy after the second roadtrip.
During all the presentations I was thinking of finally using my MYO gesture control armband again as a gimmick. After not using it at the other presentations I was thinking of using it at the final one. But then something completely different happened.
The challenge for the final presentation is to use the Japanese Presentation style of Pecha Kucha. This means that we will have 20 slides and each of these will be active for exactly 20 seconds. Then it will automatically switch to the next one. That means we will have an exact presentation time of 6 minutes and 40 seconds. Since we are doing it "the EPS way" we will have the opportunity to show a video before that and then do our presentation. Additionally there will be a separate discussion part in which we will be able to answer certain questions with a lot more detail to give some insight into our process.
Although I am really no fan of this concept I can understand why it is mandatory. It enforces the presenters to practice and have their presentation thought through from start to end, with perfect timing and careful content selection. We will see how it goes. But first, let's do a roadtrip, again 😁 🚗
